





Specification
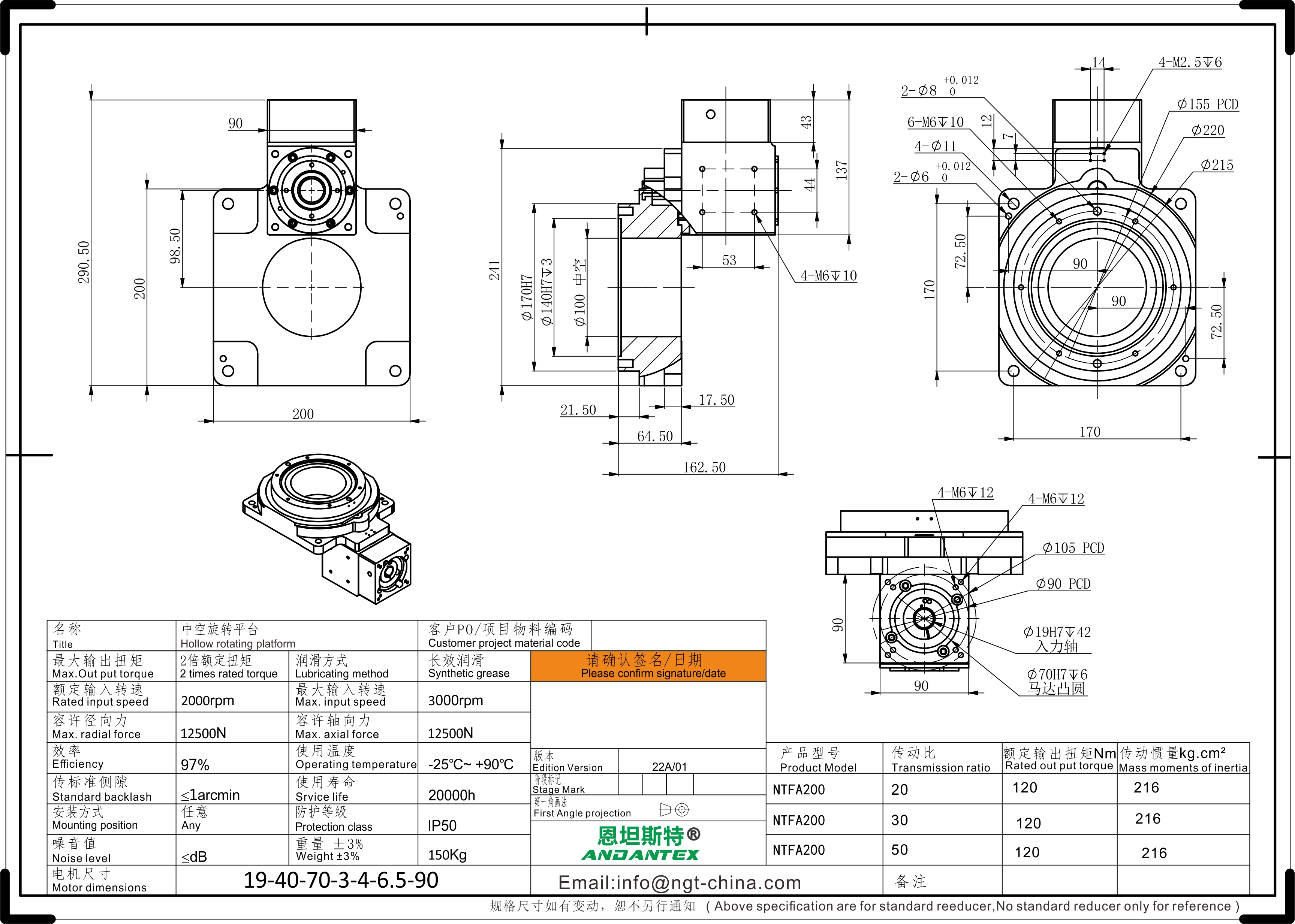
Nta
Lub kaum sab xis Hollow Rotating Platform yog siv nyob rau hauv nto mount technology (SMT) machinery thiab khoom nyob rau hauv cov nram qab no txoj kev:
Qhov chaw txuag: Vim nws qhov hollow tsim, cables thiab cua tub raj tuaj yeem teeb tsa hauv lub platform, txuag chaw hauv cov khoom siv thiab txhim kho qhov yooj yim ntawm tag nrho cov txheej txheem.
High-precision rotation: Lub platform muaj peev xwm ntawm high-precision rotary motion, uas yog haum rau cov txheej txheem SMT uas yuav tsum tau muaj meej positioning, xws li kev tso kawm, tshuaj xyuas thiab soldering.
Multi-axis tsab ntawv tsa suab: Ua ke nrog rau lwm qhov kev tawm suab platform, txoj cai-lub kaum sab xis hollow teb platform tuaj yeem paub ntau txoj kev sib tw ua kom tau raws li cov txheej txheem sib txawv.
Kev tsim khoom ntau ntxiv: Los ntawm kev sib hloov ceev thiab qhov chaw, cov khoom siv hloov pauv lub sij hawm raug txo, yog li ua kom cov khoom tsim tau.
Durability thiab Stability: Feem ntau yog ua los ntawm cov ntaub ntawv muaj zog, nws tuaj yeem tiv taus cov khoom loj thiab ua kom muaj kev ruaj ntseg hauv qhov chaw ua haujlwm siab.
Daim ntawv thov Flexibility: tuaj yeem siv dav hauv ntau yam khoom siv SMT, xws li cov tshuab tso chaw, cov cuab yeej tshuaj xyuas thiab cov kab sib txuas ua ke.
Hauv luv luv, Txoj Cai Lub Hollow Rotating Platform muab cov kev daws teeb meem zoo, hloov pauv thiab meej hauv SMT cov tshuab thiab cov cuab yeej siv, txhawb kev siv lub tshuab hluav taws xob thiab kev txawj ntse ntawm kev tsim hluav taws xob niaj hnub.
Daim ntawv thov
Hauv SMT (Surface Mount Technology) cov tshuab thiab cov cuab yeej siv, kev ua tiav ntawm ntau qhov axis yog qhov tseem ceeb los ua kom tau raws li qhov xav tau ntawm cov rooj sib txoos nyuaj. Qhov yooj yim thiab qhov tseeb ntawm txoj cai-lub kaum sab xis hollow rotary theem ua rau lawv zoo tagnrho rau kev paub txog ntau lub zog. Cov theem no feem ntau yog siv los ua ke nrog lwm hom kev txav mus los, xws li linear slides, lifting stages, thiab lwm yam, los tsim kom muaj ntau qhov kev txav chaw. Nrog cov kev tswj xyuas meej thiab cov lus tsa suab algorithms, txoj cai-lub kaum sab xis hollow rotary platforms tuaj yeem ua haujlwm kom paub cov lus tsa suab xws li, tab sis tsis txwv rau, ob-seem (XY dav hlau) thiab peb-dimensional (XYZ qhov chaw) motions.
Lub kaw lus tswj plays lub luag haujlwm tseem ceeb hauv kev paub txog kev ua haujlwm ntawm ntau lub axis. Niaj hnub nimno motion control technology siv servo motors thiab high-performance encoders uas muaj peev xwm saib xyuas thiab kho lub xeev ntawm cov theem nyob rau hauv lub sij hawm. Servo motors muab cov kev sib hloov thiab kev hloov pauv, thaum lub siab daws teeb meem encoders muab cov lus teb rau txoj haujlwm tam sim no. Yog li ntawd, los ntawm kev sib txuas ntawm txoj cai-lub kaum sab xis hollow rotary theem nrog advanced motion control software, engineers tau program complex motion trajectories and control logic to ensure that the equipment achieved high precision and speed in multi-axis motion.
Ntim cov ntsiab lus
1 x pearl paj rwb tiv thaiv
1 x tshwj xeeb ua npuas ncauj rau shockproof
1 x Cov thawv tshwj xeeb lossis lub thawv ntoo










